对于特征 Dropout 边界框的稳定性反应了检测器在不同环境的泛化性
本文最后更新于 2024年3月25日 下午
本文为论文 “Bounding Box Stability against Feature Dropout Reflects Detector Generalization across Environments” (Yang, et.al.) 的阅读笔记。
介绍
对于目标检测任务,我们通常使用 mAP 通过对比预测的 bbox 和 ground truth 来衡量预测的精确度。然而在实际场景中,我们并没有 GT,因此难以衡量检测器的泛化能力。
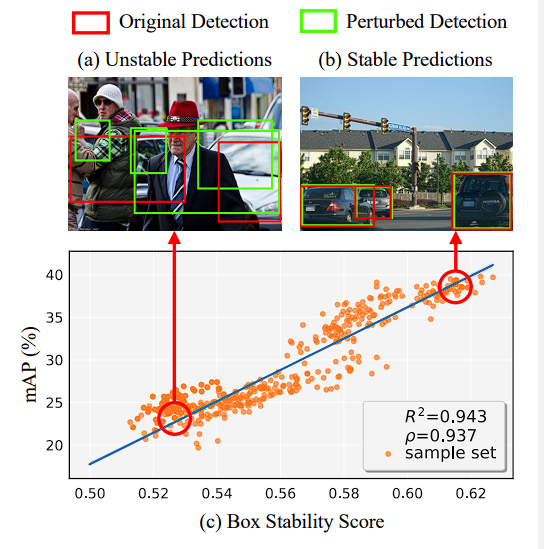
该论文从一个新的角度来衡量 bbox 的质量:bbox 在特征扰动下的稳定性。
具体来说,给定一张图片和一个训练后的检测器,使用 Monte Carlo dropout 在测试处理中,随机地让 backbone 输出的一些特征图为 0,此后,使用二分图匹配来寻找有无扰动的 bbox 的映射关系。接着,计算他们之间的 IoU 作为边框稳定性分数(BoS score).
BoS Score
定义 $N_{\text{ori}}$ 为原本的检测器检测的目标数,$N_{\text{per}}$ 为相同图像下经过 MC dropout 扰动的检测器检测到的目标数量。令 $N$ 和 $N_{\text{max}}$ 分别代表 $N_{\text{ori}}$ 和 $N_{\text{per}}$ 中较小和交大的值。
在这个基础上,我们记有较少目标的预测集合为 $y=\{y_j\}_{j=1}^N$,较多的为 $\hat{y}=\{\hat{y}_j\} ^{N _{\text{max}}}$。
为了寻找两个集合的二分图匹配,我们在 $N$ 个元素的枚举中寻找最小的损失:
$$
\hat{\sigma} = \underset{\sigma \in \mathcal{\Sigma} _N}{\arg \min} \sum _j^N \mathcal{L} _\text{match} (y_j, \hat{y} _{\sigma(j)})
$$
其中 matching loss 可以用 GIoU 损失来定义:
$$
\mathcal{L}(y, \hat{y})=\frac{\sum _j^N \mathcal{L} _{\text{giou}(b_j, \hat{b} _{\sigma(j)})}}{N}
$$
其中 $b_j, \hat{b}_{\sigma(j)}$ 为一对匹配上的 bbox. 接着就可以使用 M 张匹配的损失来衡量测试集 $\mathcal{D}^u$ 的 BoS Score:
$$
\text{BS}(\mathcal{D}^u) = \frac{\sum _{i=1}^N \mathcal{L}_i}{M}
$$